Efficient Robot Skill Learning: Grounded Simulation Learning and Imitation Learning from Observation Microsoft Research 1:15:53 4 years ago 1 478 Скачать Далее
Efficient Robot Skill Learning via Grounded Simulation Learning, Imitation Learning... - Peter Stone Institute for Advanced Study 1:11:45 4 years ago 1 001 Скачать Далее
Imitation from Observation: Learning to Imitate Behaviors from Raw Video Via Context Translation ICRA 2018 3:00 6 years ago 552 Скачать Далее
Robot learning to fish through curiosity-driven learning Pierre-Yves Oudeyer 1:09 9 years ago 333 Скачать Далее
Grounded Action Transformation for Robot Learning in Simulation Josiah Hanna 2:07 7 years ago 91 Скачать Далее
ICRA2023 - SEIL: Simulation-augmented Equivariant Imitation Learning Mingxi Jia 2:53 1 year ago 93 Скачать Далее
Coarse-to-Fine Imitation Learning: Robot Manipulation from a Single Demonstration The Robot Learning Lab at Imperial College London 5:29 3 years ago 3 123 Скачать Далее
WHIRL: Human-to-Robot Imitation in the Wild. Published at RSS 2022. Deepak Pathak 1:39 2 years ago 11 716 Скачать Далее
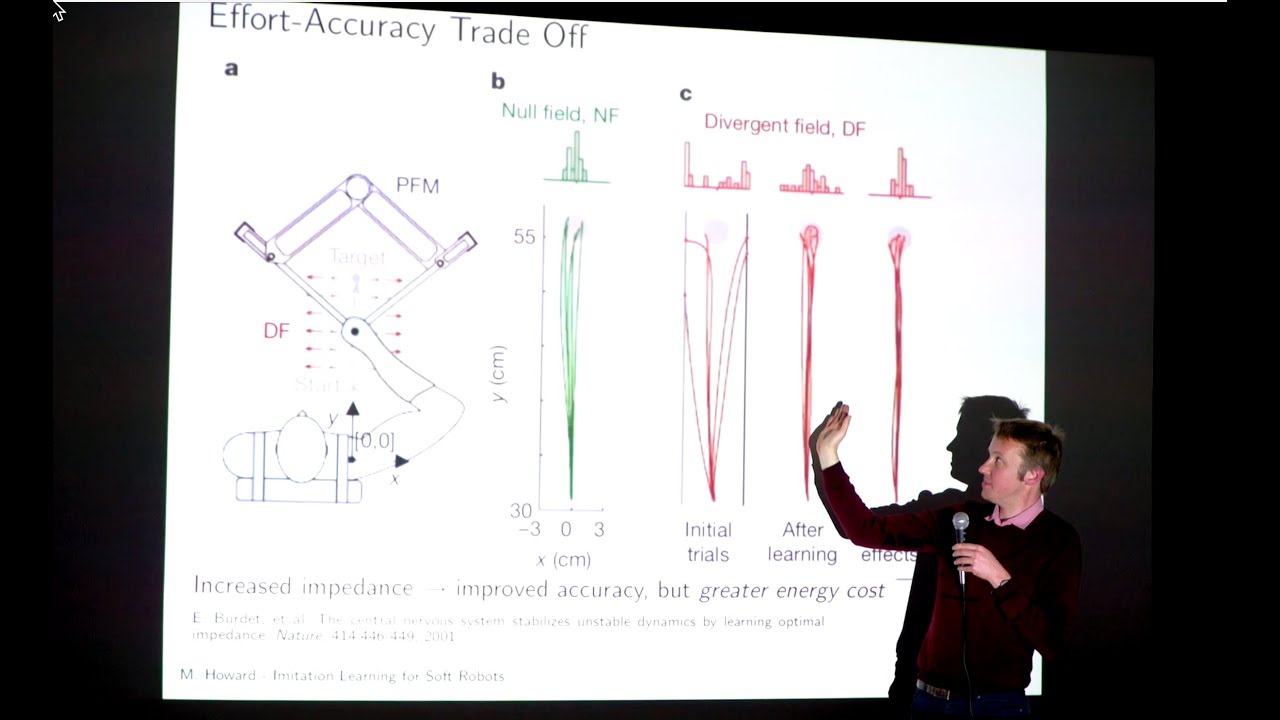
Machine Learning in Robotics - Imitation Learning for Soft Robots - Matthew Howard London Machine Learning Meetup 44:25 8 years ago 2 901 Скачать Далее
Stanford CS25: V2 I Robotics and Imitation Learning Stanford Online 1:16:08 1 year ago 11 119 Скачать Далее